NASA robotic swarm technology is one of the most exciting ideas in the future of planetary exploration. Instead of sending one large rover to study a planet, moon, or asteroid alone, future missions could use teams of smaller robots that work together. These robots could share maps, avoid hazards, study different areas at the same time, and collect more scientific data than a single machine could gather by itself.
In 2026, the most accurate way to explain this topic is through NASA’s real swarm-robotics progress, especially the CADRE mission. CADRE stands for Cooperative Autonomous Distributed Robotic Exploration. NASA’s Jet Propulsion Laboratory describes CADRE as a technology demonstration that will send a trio of small autonomous rovers to the Moon to work together, communicate through a mesh network, and map the lunar subsurface in 3D. The mission is slated to arrive at the Moon’s Reiner Gamma region aboard Intuitive Machines’ IM-3 lander in 2026 as part of NASA’s Commercial Lunar Payload Services initiative.
This does not mean NASA has already deployed a complete planetary swarm-mapping network across the Moon or Mars. It means NASA is testing the technologies that could make future robotic swarms possible. For readers, the simplest explanation is this: NASA robotic swarm technology is moving space exploration from “one robot working alone” toward “multiple robots cooperating like a smart exploration team.”
For related background, you can also read our guide on how NASA maps the surface of Mars, because planetary mapping is the foundation that helps scientists choose landing sites, plan rover routes, identify hazards, and understand alien terrain.
Editorial Note
This article separates confirmed NASA technology demonstrations from future concepts. NASA’s CADRE project is a real lunar technology demonstration involving multiple autonomous rovers. However, a large operational “NASA robotic swarm planetary mapping system” should not be described as already active in 2026 unless NASA officially confirms such a deployed system.
Key Statistics and Facts
NASA/JPL’s CADRE project is developing a network of small rovers designed to work together on the Moon in a technology demonstration. The rovers will communicate with each other and a base station using mesh network radios and will operate with a high level of autonomy.
CADRE is planned for the Reiner Gamma region of the Moon aboard the Intuitive Machines 3 lander in 2026 under NASA’s CLPS initiative. The robots are expected to operate during one lunar day, about 14 Earth days.
NASA says CADRE-type systems could improve future autonomous exploration of the Moon, Mars, and beyond by allowing multiple robots to share position information, map knowledge, and science sensor data. NASA gives ground-penetrating radar as an example of how multiple rovers could create subsurface maps at different depths.
NASA’s Starling mission is also important for swarm technology because it uses four CubeSats in low Earth orbit to demonstrate cooperative spacecraft operations, distributed science data collection, and autonomous coordination without constant ground control.
NASA has also studied advanced swarm concepts through NIAC, including Swarm Flyby Gravimetry, a concept where small probes released during a flyby could help estimate the gravity field and internal structure of an asteroid or comet.
What Is a NASA Robotic Swarm?
A robotic swarm is a group of robots that work together instead of acting as separate machines. Each robot may have its own sensors, movement system, communication link, and onboard decision-making ability. When the robots share information, the whole group becomes more useful than one robot alone.
In planetary exploration, this matters because alien surfaces are difficult, dangerous, and unpredictable. A single rover can only move in one direction at a time. If it gets stuck, damaged, or blocked by rough terrain, the mission can lose major science opportunities. A swarm can reduce that risk by spreading work across multiple robots.
Example: imagine three small rovers exploring a lunar region. One rover studies the surface texture, another uses radar to look below the surface, and another checks a safer route around rocks or slopes. If they share information, the team can build a better map than any one rover could create alone.
This is why NASA robotic swarm technology is so important. It could help future missions explore faster, map more terrain, reduce mission risk, and collect data from multiple locations at the same time.
Confirmed Facts vs Future Possibilities
| Topic | Status in 2026 | Safe Explanation |
|---|---|---|
| CADRE lunar rovers | Official NASA/JPL technology demonstration | Planned trio of autonomous rovers for lunar exploration |
| CADRE arrival at Reiner Gamma | Planned for 2026 | Slated to arrive aboard Intuitive Machines IM-3 |
| Multi-robot lunar mapping | Technology demonstration | CADRE will test cooperative autonomous exploration and 3D subsurface mapping |
| Mars robotic swarms | Future possibility | Could support future exploration, but not a confirmed deployed 2026 system |
| Asteroid swarm mapping | Conceptual/NIAC-level studies | Ideas like Swarm Flyby Gravimetry explore future small-body mapping methods |
| Ocean-world robot swarms | Future concept | NASA has studied concepts like SWIM for icy moons, but these are not active planetary missions |
| Fully operational NASA planetary swarm network | Not confirmed | Should not be described as already deployed |
In simple words, NASA is not operating a giant swarm of planetary robots across the solar system in 2026. The accurate story is that NASA is testing the building blocks of that future.
CADRE: NASA’s Strongest Robotic Swarm Example
CADRE is the best official NASA example for this topic. The name stands for Cooperative Autonomous Distributed Robotic Exploration. It is designed to show how multiple robots can work together with less direct human control.
JPL says CADRE will send a trio of small rovers to the Moon. These rovers will communicate through mesh network radios with each other and with a base station aboard a lunar lander. The system is designed so the rovers can make decisions and act without needing constant instructions from Earth.
This is important because communication delays and limited human control are major challenges in space. On the Moon, the delay is smaller than on Mars, but mission operations still need careful planning. On Mars or farther worlds, the delay becomes much larger. A future swarm needs the ability to interpret commands, divide tasks, avoid hazards, and adapt to new conditions.
Example: instead of mission control sending every movement command one by one, a team could send a higher-level instruction such as “map this region.” The robots would then coordinate routes, avoid overlapping work, and collect data together.
This is the real revolution behind NASA robotic swarm mapping. It is not only about having more robots. It is about giving robots enough autonomy to cooperate intelligently.
Why Reiner Gamma Matters
CADRE is planned for the Reiner Gamma region of the Moon. Reiner Gamma is scientifically interesting because it is associated with a lunar swirl, a bright and unusual surface feature. Lunar swirls are still studied because they may connect to magnetic anomalies, space weathering, and surface processes.
A swarm robot demonstration at a place like Reiner Gamma is useful because the Moon offers real terrain, real dust, real lighting conditions, real thermal changes, and real communication constraints. Ground testing on Earth is helpful, but it cannot fully copy the lunar environment.
Example: a rover tested in a laboratory may work well on smooth simulated terrain. But on the Moon, the robot must handle dust, loose regolith, uneven surfaces, shadows, communication limitations, and harsh temperature changes. A swarm test in the real lunar environment gives engineers better evidence.
This is why CADRE matters beyond one mission. It can help NASA understand how future teams of robots might explore the Moon, Mars, asteroids, or icy worlds.
For more Moon-related technology context, you can read our article on NASA lunar dust mitigation technology, because dust is one of the biggest practical challenges for lunar robots and surface systems.
How Robotic Swarms Could Improve Planetary Mapping
Planetary mapping means creating detailed scientific maps of another world. These maps can show surface shape, rock distribution, slopes, craters, temperature patterns, subsurface layers, mineral signatures, and possible hazards.
Traditional planetary mapping often depends on orbiters, cameras, radar, and single rovers. These tools are still extremely important. However, robotic swarms could add a new layer of local detail.
A swarm could improve planetary mapping in several ways.
First, multiple robots can cover more ground. One robot may take days to cross a region, while several robots can divide the area and work in parallel.
Second, robots can observe the same location from different positions. This can improve 3D reconstruction, terrain modeling, and subsurface interpretation.
Third, a swarm can reduce mission risk. If one robot fails, others may continue collecting data.
Fourth, swarm robots can combine different instruments. One robot may carry a camera, another may carry radar, and another may carry a seismic sensor or thermal instrument.
Example: to map a buried lava tube on the Moon or Mars, one rover could drive across the surface with radar, another could measure ground vibrations, and another could create a high-resolution visual map. Together, the robots could produce a more complete picture of the underground structure.
For readers who want the basic mapping background first, see our article on how NASA maps the surface of Mars.
Mesh Networks: How the Robots Talk to Each Other
A mesh network is a communication system where devices can pass information between each other instead of depending on one central connection only. For a robotic swarm, this is extremely useful.
In CADRE, JPL says the rovers will communicate through mesh network radios with each other and a base station. This helps the robots share information and coordinate their work.
Example: if Rover 1 finds a rocky hazard, it can share that map update with Rover 2 and Rover 3. The other rovers can then avoid the area or study it from another angle. Without communication, each robot would have to discover the same hazard independently.
Mesh networks also matter because planetary terrain can block signals. A rover behind a hill or inside a shallow depression may have trouble communicating directly with a lander. A nearby robot may help pass the signal along.
This type of communication could become even more important for future Mars caves, lunar polar regions, asteroid surfaces, and icy moon missions.
As future missions collect more data, stronger space communication will become essential. You can read more in our guide on NASA deep space laser communication technology.
Subsurface Mapping: Looking Below the Surface
One of the most exciting possibilities of swarm mapping is subsurface exploration. NASA explains that multi-agent systems using ground-penetrating radar could adjust the baseline between different rovers and create subterranean maps at different depths.
Subsurface mapping means studying what lies below the visible surface. This could include buried rocks, lava tubes, ice deposits, regolith layers, voids, or geological boundaries.
Example: imagine three rovers driving across a lunar plain with radar instruments. If they collect radar data from different positions, scientists may be able to reconstruct underground layers in 3D. This is similar to how doctors use multiple imaging angles to understand what is happening inside the human body.
This could be important for future Moon bases because astronauts may need to find stable ground, identify buried hazards, understand regolith depth, and locate possible resources.
For a related future surface-infrastructure topic, read our article on NASA lunar base power infrastructure.
Why Autonomy Matters in Space Robotics
Autonomy means a robot can make some decisions on its own. It does not mean the robot is “alive” or uncontrolled. It means engineers give the robot software that helps it respond to terrain, hazards, goals, and mission rules.
For robotic swarms, autonomy is essential. If humans must manually control every wheel movement of every robot, swarm exploration becomes too slow and difficult. The robots need to divide tasks, update maps, avoid obstacles, and continue working even when communication is limited.
NASA’s Starling mission shows why autonomy is important beyond surface rovers. Starling uses four CubeSats to demonstrate cooperative spacecraft operations and technologies for distributed missions, clusters, or swarms. NASA says Starling is testing how spacecraft can operate in a synchronized manner without constant ground resources.
Example: if a group of satellites is studying a planet’s atmosphere or magnetic field, they may need to coordinate positions and collect data at the same time. If they wait for every instruction from Earth, the science opportunity could be lost.
This same principle applies to surface robots. A swarm must act as a coordinated team, not just a collection of machines waiting for commands.
Planetary Mapping on the Moon
The Moon is the best near-term place to test robotic swarm mapping because it is closer to Earth than Mars and is central to NASA’s Artemis exploration goals. Swarm robots could help map landing zones, study surface hazards, examine permanently shadowed regions, inspect equipment, and support future human operations.
Example: before astronauts build a lunar power system, robots could map the local terrain to find stable areas for solar arrays, cables, charging stations, and landing pads. They could also identify slopes, rocks, dust conditions, and shadow patterns.
This would make future missions safer because engineers would have more local data before sending astronauts or large infrastructure.
This internal connection fits naturally with your article on NASA lunar base power infrastructure, because mapping and power planning are connected. A base cannot be designed well without accurate terrain and lighting maps.
Planetary Mapping on Mars
Mars is another major future target for swarm robotics. NASA has already used orbiters, landers, and rovers to map Mars for decades. A robotic swarm could add local detail that orbiters cannot provide alone.
Mars has craters, dunes, rocks, slopes, dust, ice-related features, ancient river channels, and possible subsurface structures. A team of robots could divide tasks across a landing area and build a more complete map.
Example: one Mars robot could scout safe driving routes, another could inspect rocks, and another could study shallow subsurface layers. If the robots share data, mission planners could understand the region faster.
However, this should be described as a future possibility, not a confirmed 2026 deployed NASA Mars swarm mission. CADRE is lunar-focused. Mars swarm exploration remains a future direction that could benefit from the technologies CADRE is testing.
Mapping Asteroids and Small Bodies
Robotic swarms may also help study asteroids and comets. These small bodies have weak gravity, irregular shapes, loose surface material, and complex internal structures. Mapping them is difficult because traditional rovers may not drive normally in very low gravity.
NASA’s NIAC-funded Swarm Flyby Gravimetry concept proposed releasing small low-cost probes during a flyby of an asteroid or comet. By tracking how the small body’s gravity deflects those probes, scientists could estimate its gravity field and infer internal structure without needing a dedicated orbiter or lander.
Example: if a spacecraft releases several tiny probes near an asteroid, each probe may drift slightly differently because of the asteroid’s gravity. By measuring those changes, scientists can learn whether the asteroid is dense, porous, solid, rubble-like, or uneven inside.
This is important for science and planetary defense. Understanding asteroid structure helps scientists know how an asteroid formed and how it might respond to a future deflection mission.
For related context, read our article on NASA planetary defense asteroid missions.
Ocean-World Robot Swarms: A Future Concept
Not all robotic swarms would drive on rocky surfaces. NASA has also studied concepts for swarms of small swimming robots that could someday explore subsurface oceans on icy moons such as Europa or Enceladus.
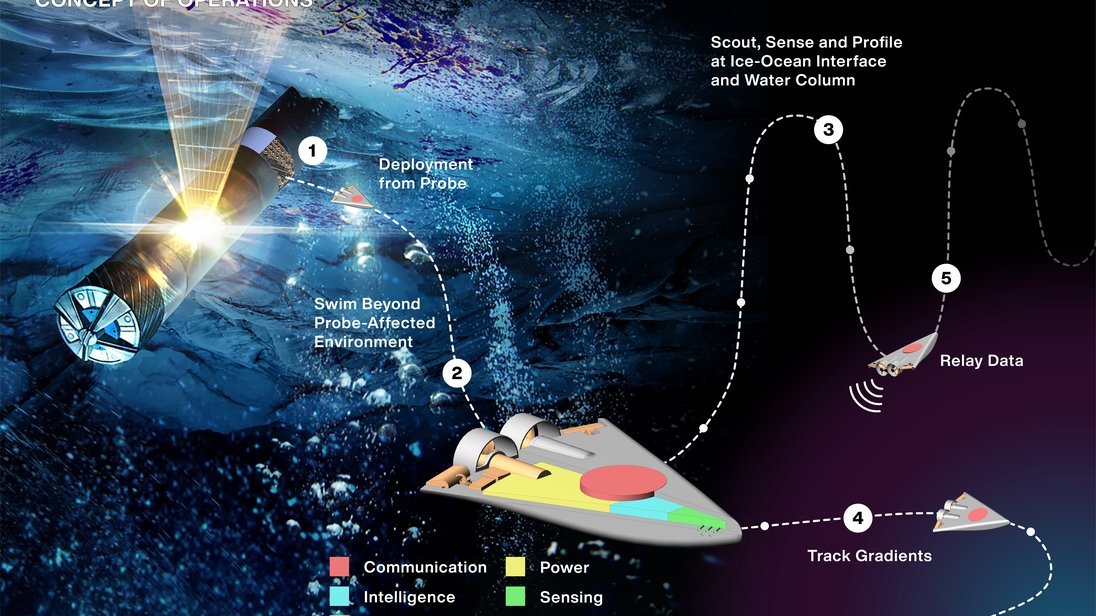
NASA’s SWIM concept imagines cellphone-size swimming robots released beneath an icy shell to look for signs of life and measure conditions in an ocean environment. This is an advanced concept, not an active mission currently exploring an ocean world.
Example: a larger ice-melting probe could descend through the ice, then release many tiny swimming robots into the ocean. The robots could spread out, measure temperature, chemistry, salinity, pressure, and possible biological indicators from different locations.
This is useful for readers because it shows that “robotic swarm” does not only mean wheeled rovers. A swarm could be made of flying drones, hopping probes, satellites, surface rovers, or swimming robots depending on the world being explored.
Why Robotic Swarms Could Be Better Than One Rover
A single rover is powerful, but it has limits. It moves slowly, covers one path, carries limited instruments, and becomes a single point of failure. A robotic swarm can distribute tasks across several machines.
Example: if one rover in a swarm has trouble with a wheel, the entire mission may not be lost. Other robots can continue mapping, relay communication, or investigate nearby targets.
A swarm also allows scientists to compare measurements from different places at the same time. This is useful for studying ground motion, temperature changes, dust behavior, radiation, magnetic fields, and subsurface structure.
This does not mean future swarms will replace all large rovers. Large rovers can carry bigger instruments, drill deeper, and operate for many years. The better future is likely a mixed system: orbiters, large rovers, small swarm robots, landers, satellites, and human explorers working together.
Main Challenges of Robotic Swarm Mapping
Robotic swarm mapping is promising, but it is difficult. The first challenge is communication. Robots must share data without using too much power or depending on perfect line-of-sight communication.
The second challenge is autonomy. Robots must make decisions safely. A wrong decision could waste power, damage a robot, or cause the swarm to collect poor data.
The third challenge is power. Small robots have limited battery capacity. Lunar nights, Martian dust, shadows, and cold temperatures can make power management difficult.
The fourth challenge is navigation. Planetary surfaces do not have GPS like Earth. Robots must use cameras, sensors, maps, and onboard software to understand their location.
The fifth challenge is data management. A swarm can collect a lot of information, but not all of it can be sent back immediately. The robots need to prioritize important data.
Example: if three robots collect radar, camera, and motion data at the same time, the system must decide what data is most urgent, what can be compressed, and what can wait.
This is why CADRE is important as a technology demonstration. It helps test these swarm problems in a real mission environment.
What People Often Get Wrong
Many people think robotic swarms are already fully replacing astronauts and large rovers. That is not correct. Swarm robots are a developing technology, not a complete replacement for human exploration or major rover missions.
Another mistake is assuming that every “NASA robotic swarm 2026” article refers to a confirmed Mars mission. The strongest official 2026 example is CADRE on the Moon, not a fully deployed Mars swarm.
A third mistake is thinking a swarm means the robots act randomly. Real mission swarms are carefully designed. They follow mission rules, safety limits, communication protocols, and science goals.
A fourth mistake is assuming small robots are always cheaper or easier. Small robots reduce some risks, but they create new challenges in power, durability, communication, navigation, and data processing.
Finally, people often confuse technology demonstrations with full operational missions. CADRE is a technology demonstration. Its success could support future missions, but it should not be described as a complete planetary mapping network already in service.
Practical Reader Takeaway
NASA robotic swarm technology is best understood as a new exploration method where multiple robots cooperate to map and study planetary environments.
CADRE is the key official NASA/JPL example for 2026.
The Moon is the near-term testing ground.
Swarm robots could improve surface mapping, subsurface imaging, hazard detection, and science coverage.
Future swarms may explore Mars, asteroids, comets, caves, lava tubes, and icy ocean worlds.
The technology is promising, but it is still developing.
Frequently Asked Questions
What is NASA robotic swarm technology?
NASA robotic swarm technology refers to teams of robots that cooperate during exploration. These robots can share data, coordinate routes, map terrain, avoid hazards, and collect distributed science measurements.
Is NASA using robotic swarms in 2026?
NASA/JPL’s CADRE mission is the strongest official 2026 example. It is planned to send a trio of autonomous rovers to the Moon’s Reiner Gamma region to demonstrate cooperative exploration and 3D subsurface mapping.
What is CADRE?
CADRE stands for Cooperative Autonomous Distributed Robotic Exploration. It is a NASA/JPL technology demonstration involving multiple autonomous lunar rovers designed to work together through mesh network communication.
Will robotic swarms map Mars in 2026?
A fully operational NASA Mars robotic swarm should not be presented as confirmed for 2026. Mars swarm exploration is a future possibility that could benefit from technologies tested by missions like CADRE.
How can robot swarms map below the surface?
Multiple robots can collect ground-penetrating radar data from different positions. NASA explains that multi-agent radar data can help create subterranean maps at different depths.
Why are robotic swarms useful for planetary exploration?
They can cover more ground, collect data from multiple locations, reduce single-point failure risk, and combine different sensors for better maps.
Are robotic swarms better than traditional rovers?
They are not always better. Large rovers can carry bigger instruments and operate for long periods. Swarms are useful for distributed mapping, hazard scouting, and multi-point measurements. Future missions may use both.
Could robotic swarms help planetary defense?
Yes, swarm concepts could help map asteroid gravity, surface structure, and internal density. NASA’s Swarm Flyby Gravimetry concept studied how small probes could help estimate asteroid or comet gravity fields during a flyby.
Could robot swarms explore ocean worlds?
NASA has studied future concepts such as SWIM, where small swimming robots could one day explore subsurface oceans on icy moons. This remains a future concept, not an active ocean-world mission.
Conclusion
NASA robotic swarm technology could become one of the most important changes in future planetary mapping. Instead of relying only on one rover, future missions may use groups of smaller robots that cooperate, share information, and explore different parts of a surface at the same time.
The strongest official example for 2026 is CADRE, NASA/JPL’s Cooperative Autonomous Distributed Robotic Exploration technology demonstration. CADRE is planned to send a trio of autonomous rovers to the Moon’s Reiner Gamma region, where they will test mesh-network communication, cooperative autonomy, distributed measurements, and 3D subsurface mapping. This does not mean NASA has already deployed a full planetary swarm network, but it does show that swarm exploration is moving from theory toward real mission testing.
Robotic swarms could help future missions map lunar terrain, study Martian surfaces, investigate asteroid interiors, inspect caves, search for subsurface ice, and explore ocean worlds. They could also support astronauts by scouting hazards, mapping safe routes, and identifying science targets before humans arrive.
For readers, the simplest explanation is this: NASA robotic swarm technology is about teamwork in space. One robot can explore a path, but a swarm can explore a region. That shift could make future space exploration faster, safer, smarter, and more scientifically powerful.
Sources and Further Reading
NASA/JPL: CADRE Mission Overview
NASA: Cooperative Autonomous Distributed Robotic Exploration CADRE
NASA: Satellite Swarm’s Expanded Mission Powers Smarter Operations
NASA: Gravity Poppers for Interior Mapping of Small Solar System Bodies
NASA: Swarm of Tiny Swimming Robots Could Look for Life on Distant Worlds